
Искусство в миллиметрах: Как высокоточные подшипники наделяют роботов «гибкими руками»
2026-01-27
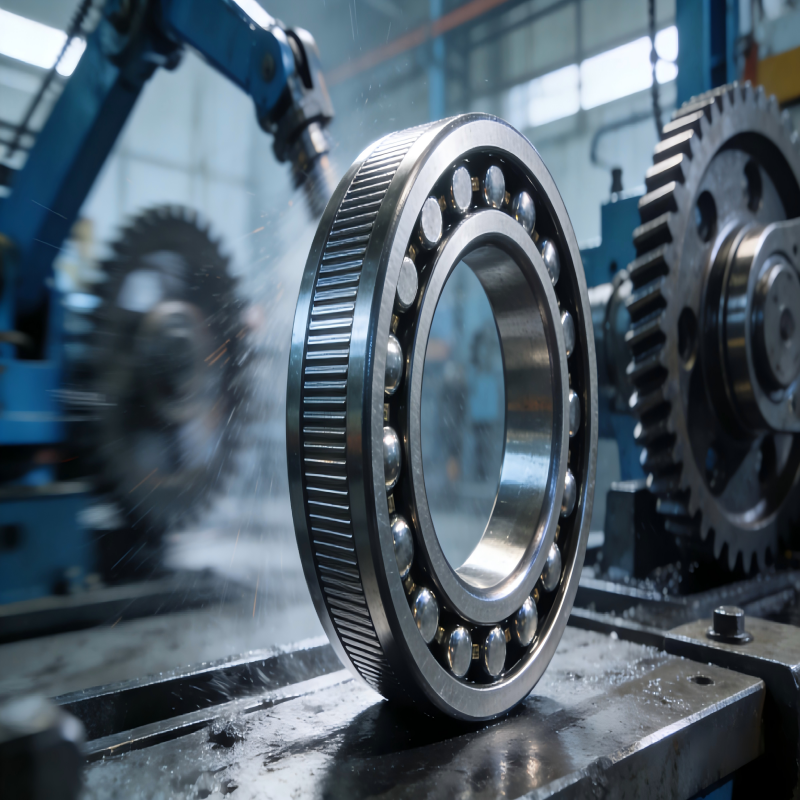
В суставах и исполнительных механизмах промышленных роботов точность высокоточных подшипников напрямую определяет скорость их движения, плавность и точность позиционирования. Чтобы роботы могли гибко и точно выполнять такие операции, как сборка и сварка, подобно человеческим рукам, точность подшипников должна достигать микронного甚至 субмикронного уровня.
Это экстремальная гонка в рамках миллиметров. Зазор и трение традиционных подшипников усиливаются при высокочастотном и высокоточном повторяющемся движении роботов, приводя к дрожанию и дрейфу позиционирования. Для решения этой проблемы инженеры разработали «нулезазорные» или предварительно нагруженные подшипники. Благодаря специальной конструкции и технологиям сборки они устраняют внутренние зазоры, обеспечивая мгновенный и без задержек отклик.
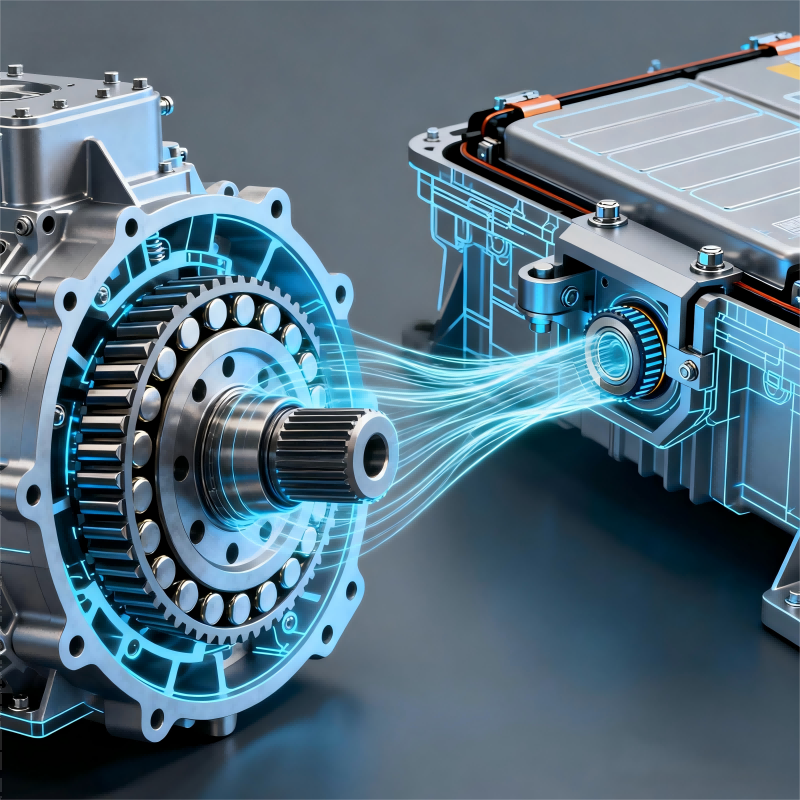
В то же время, чтобы удовлетворить требования кооперативных роботов в части «гибкости» и «легкости», появились тонкостенные подшипники. При сохранении достаточной жесткости и точности они значительно уменьшают объем и вес, а также оптимизируют характеристики трения, делая движения роботов более плавными и энергоэффективными.
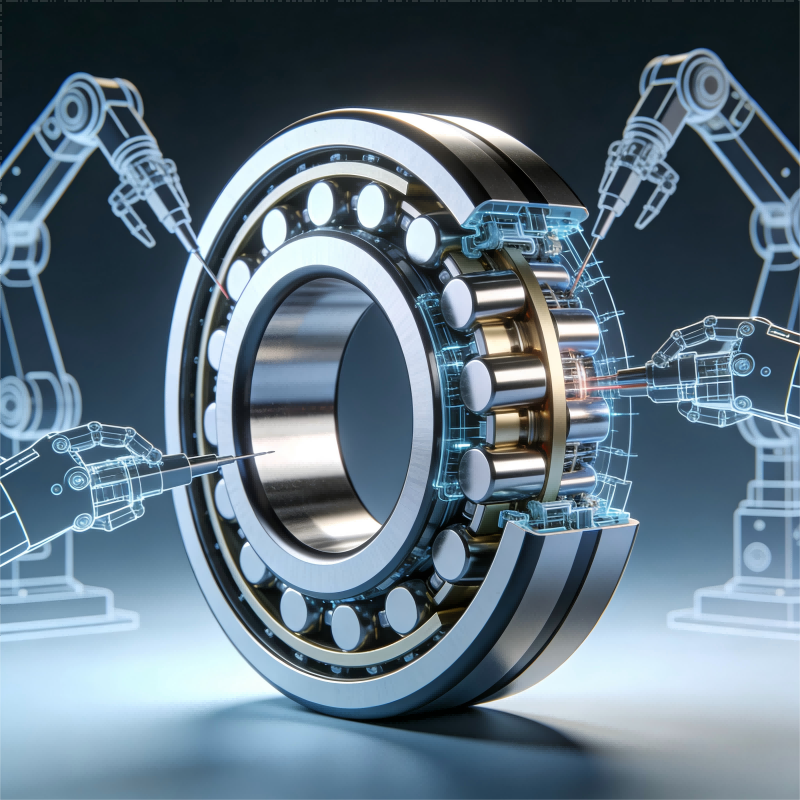
От шестиосевых промышленных роботов до гибких хирургических роботов — появление каждого высокоточного подшипника невозможно без вакуумной термической обработки, сверхточной шлифовки, интеллектуальной сборки и 100% онлайн-контроля. Именно эта передовая технология, скрытая в «суставах», движет интеллектуальным производством и автоматизированной медициной к новым высотам.
Последние новости